In Stock! Maytech Mini VESC6 based controller 30A 12S 50V MTSPF6.0M for Education Robots
In Stock! Maytech Mini VESC6 based controller 30A 12S 50V MTSPF6.0M for Education Robots
SKU:MTSPF6.0M
Não foi possível carregar a disponibilidade de recolha
Have Doubts? Contact US!!
Have Doubts? Contact US!!
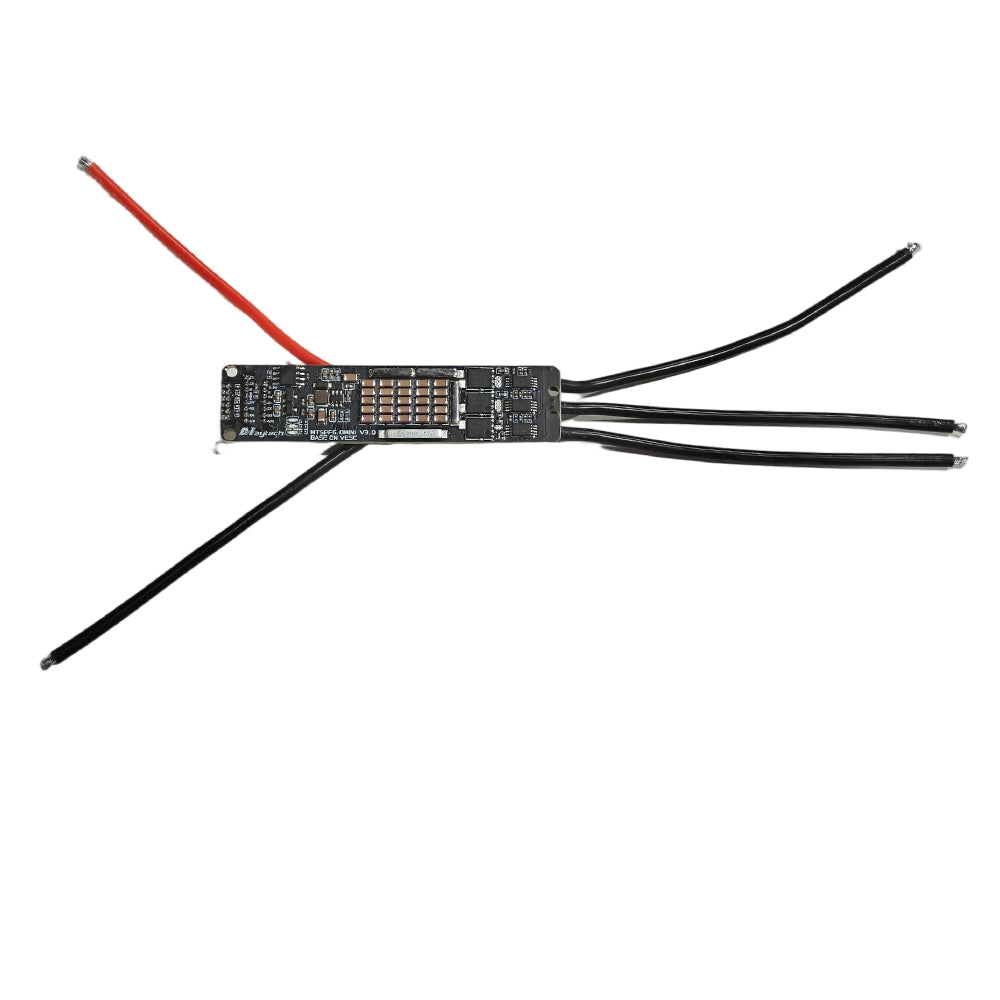
Maytech Mini VESC6 based controller 30A 12S MTSPF6.0M ( MTSVESC6.0MINI ) for Robots RC models
In stock!
Specifications:
Updates from 10th July 2026:
- The new version adds CAN bus functionality (this feature was not available in the older version).
- The new version can operate at higher voltages, up to 50V (60V if using current mode without braking function) (the older version's maximum was 42V).
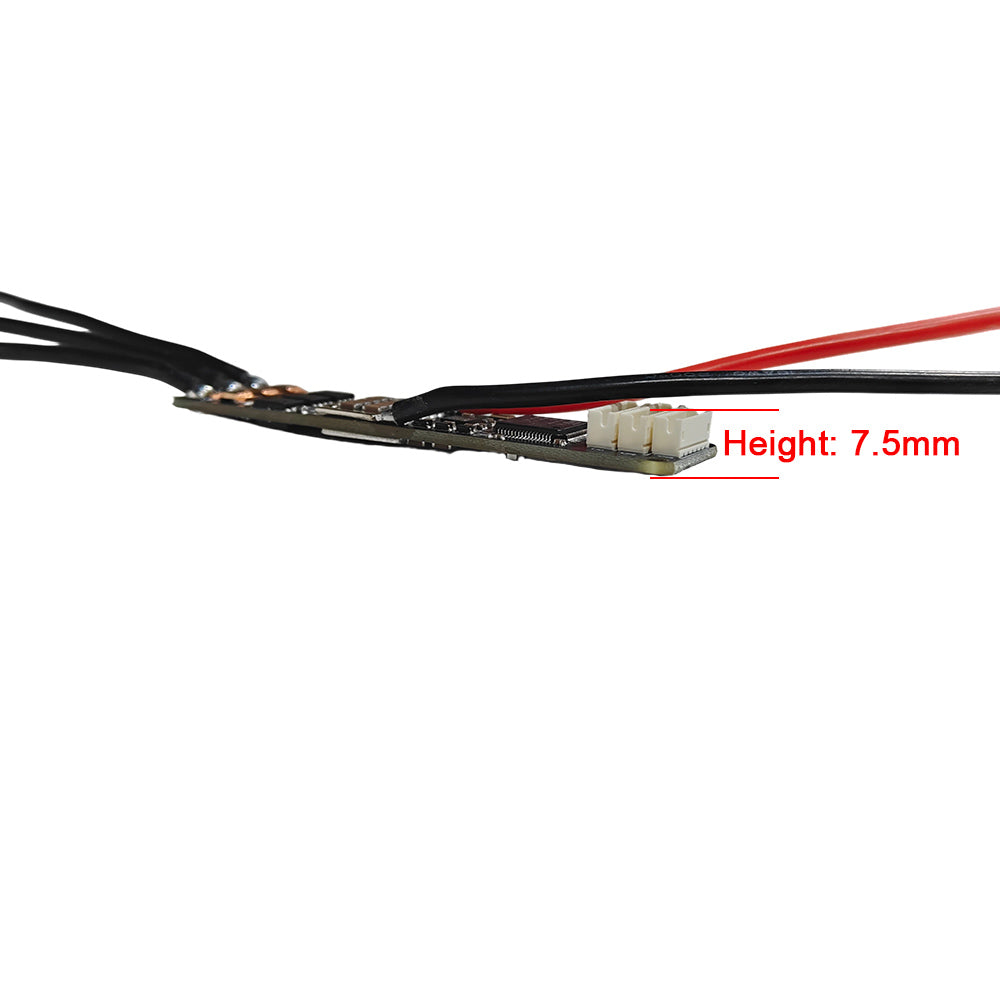
- New Updated size: 79mm*18.5mm.
Model no: MTSPF6.0M ( MTSVESC6.0MINI ) without connectors
Voltage: 8V-50V; Lipo 3-12S
BEC: 5V/1.5A
Cont. Current: 30A
Burst Current: 50A
Hardware version: based on VESC6
PCB size: 79mm*18.5mm MINI Size
Wight: 22g
Without accessories
Application: small robots, fighting robot, e-bike, underwater ROV, etc.
Function overview
- The smallest VESC based controller, can be used for miniaturized equipment, such as smart cars, micro robots, electric roller skates, drones, electric models, etc.
- Based on powerful VESC software and hardware, it supports PWM analog voltage UART and USB speed signal input. It supports sensored and sensorless brushless motors and brushed motors, and supports square wave and FOC modes.
- Support up to 12S lithium battery,over‐current/over‐temperature/over‐voltage protection.
- Support VESC_TOOL, UART is enabled by default in the factory firmware. It is recommended to connect VESC through the serial port of the host computer. If you need a USB connection, you can use the random adapter cable to connect.
- Recommended matching scheme: 6S lithium battery plus MTO2830 with Hall sensoredbrushless motor.
Port Defination:
Notice:
-
Never connect one reclever to two or more V6/V75 based SUPERFOC ESCs or VESCs in an array! Permanent damage may result from Y-PPM wiring.
-
Only connect CAN L and CAN H ! GND pins and 5V should never be connected in a V6/V75 based SUPERFOC ESCs or VESC array.

Please subjet to this new updated size: