


In Stock! Maytech MTVESC50A 50A SuperESC based on VESC4.12 speed controller Bejamin Vedder VESC
In Stock! Maytech MTVESC50A 50A SuperESC based on VESC4.12 speed controller Bejamin Vedder VESC
SKU:MTSPF50A
Normale prijs
$88.90
Normale prijs
Aanbiedingsprijs
$88.90
Eenheidsprijs
per
Verzendkosten worden berekend bij de checkout.
Kan beschikbaarheid voor afhalen niet laden
Have Doubts? Contact US!!
Have Doubts? Contact US!!
Notice before order:
This version ESC is updated with new components. (ESCs in Different production batch maybe with different chips. Please subject to the actual product you received.)
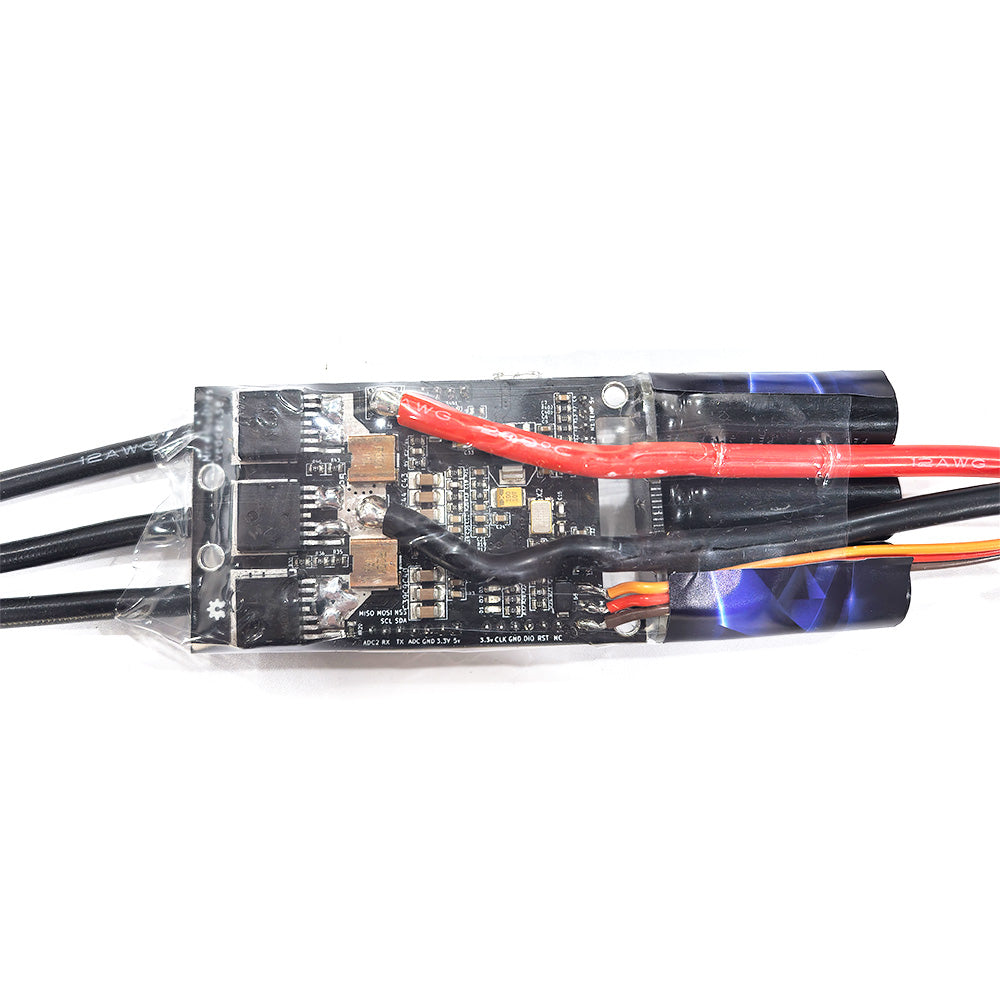
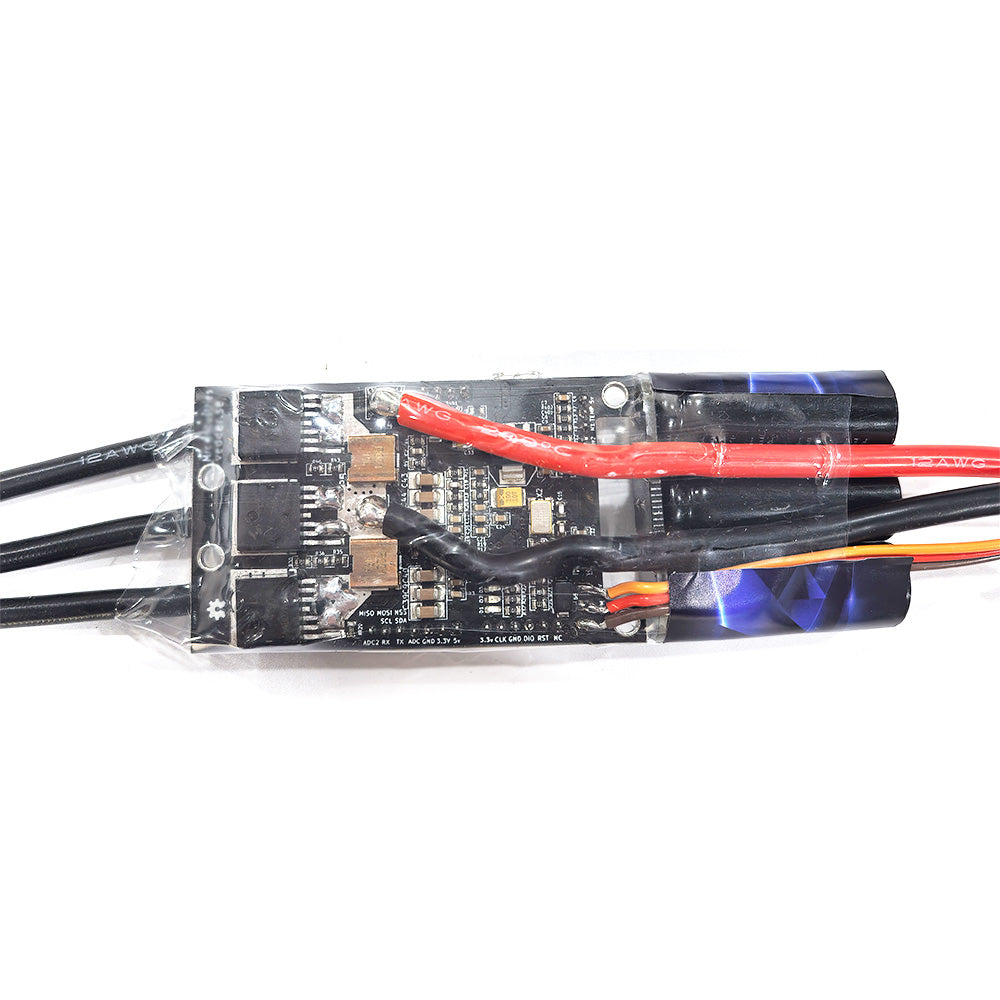
SuperESC based on VESC speed controller – Open Source ESC
Specifications: firmware can be updated by official VESC_TOOL; hardware 4.12
MTSPF50A ( MTVESC50A )
Application e-skateboard/E-bike/etc
BEC: 5V BEC
Lipo: 3-12Cells
Voltage: 8V-60V
Accessory: with USB cable
Package: W/ Box
Capacitors: 3pcs 680uf 63V
Dimension of VESC board: 60x40mm
Power wire: Silicon wire
Connectors: 4.0mm Golden Connectors
BEC: 5V BEC
Lipo: 3-12Cells
Voltage: 8V-60V
Accessory: with USB cable
Package: W/ Box
Capacitors: 3pcs 680uf 63V
Dimension of VESC board: 60x40mm
Power wire: Silicon wire
Connectors: 4.0mm Golden Connectors
The VESC – Open source ESC/speed controller are made according to the Vedder VESC BOM. The VESC speed controller can also be used for electric skateboards, electric bicycles, RC cars, and other electric vehicles.
•Duty-cycle control, speed control or current control.
•Seamless 4-quadrant operation.
•Interface to control the motor: PPM signal (RC servo), analog, UART, I2C, USB or CAN-bus.
•Wireless wii nunchuk (Nyko Kama) control through the I2C port. This is convenient for electric skateboards.
•Consumed and regenerated amp-hour and watt-hour counting.
•Optional PPM signal output. Useful when e.g. controlling an RC car from a raspberry pi or an android device.
•The USB port uses the modem profile, so an Android device can be connected to the motor controller without rooting. Because of the servo output, the odometry and the extra ADC inputs (that can be used for sensors), this is perfect for modifying an RC car to be controlled from Android (or raspberry pi).
•Adjustable protection against ◦Low input voltage
◦High input voltage
◦High motor current
◦High input current
◦High regenerative braking current (separate limits for the motor and the input)
◦Rapid duty cycle changes (ramping)
◦High RPM (separate limits for each direction).
•When the current limits are hit, a soft back-off strategy is used while the motor keeps running. If the current becomes way too high, the motor is switched off completely.
•The RPM limit also has a soft back-off strategy.
•Commutation works perfectly even when the speed of the motor changes rapidly. This is due to the fact that the magnetic flux is integrated after the zero crossing instead of adding a delay based on the previous speed.
•When the motor is rotating while the controller is off, the commutations and the direction are tracked. The duty-cycle to get the same speed is also calculated. This is to get a smooth start when the motor is already spinning.
•All of the hardware is ready for sensorless field-oriented control (FOC).
•Seamless 4-quadrant operation.
•Interface to control the motor: PPM signal (RC servo), analog, UART, I2C, USB or CAN-bus.
•Wireless wii nunchuk (Nyko Kama) control through the I2C port. This is convenient for electric skateboards.
•Consumed and regenerated amp-hour and watt-hour counting.
•Optional PPM signal output. Useful when e.g. controlling an RC car from a raspberry pi or an android device.
•The USB port uses the modem profile, so an Android device can be connected to the motor controller without rooting. Because of the servo output, the odometry and the extra ADC inputs (that can be used for sensors), this is perfect for modifying an RC car to be controlled from Android (or raspberry pi).
•Adjustable protection against ◦Low input voltage
◦High input voltage
◦High motor current
◦High input current
◦High regenerative braking current (separate limits for the motor and the input)
◦Rapid duty cycle changes (ramping)
◦High RPM (separate limits for each direction).
•When the current limits are hit, a soft back-off strategy is used while the motor keeps running. If the current becomes way too high, the motor is switched off completely.
•The RPM limit also has a soft back-off strategy.
•Commutation works perfectly even when the speed of the motor changes rapidly. This is due to the fact that the magnetic flux is integrated after the zero crossing instead of adding a delay based on the previous speed.
•When the motor is rotating while the controller is off, the commutations and the direction are tracked. The duty-cycle to get the same speed is also calculated. This is to get a smooth start when the motor is already spinning.
•All of the hardware is ready for sensorless field-oriented control (FOC).