Beginner's Guide: How to adjust VESC / Maytech SUPERFOC ESC FOC and BLDC?
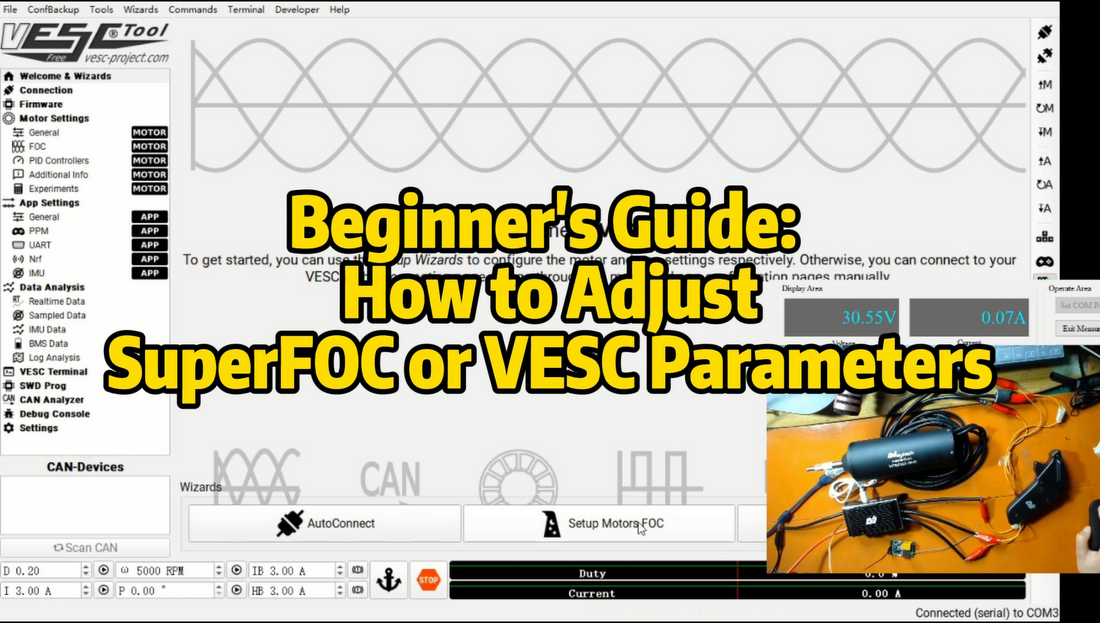
Setup FOC Wizard in VESCTOOL.
Related products:
VESC based Controllers/Remotes
This video will tell you how to set your VESC configuration in VESCTOOL?
Here we use below items as example to run the test:
1. Fully Waterproof Motor 65162 Inrunner Motor
2. Maytech New 200A 70V ESC MTSPF7.12K SUPERCASE200A V75 VESC_TOOL Compatible controller
3. Maytech MTSKR1905WF V2 New Waterproof Remote Control
Detection Steps:
1. Connect your VESC to computer and VESCTOOL
2. Setup Motors FOC in wizard, write in correct battery cells number according to battery you use, choose suitable motor type you use, here we use 30V voltage, so we write in 8 cells and choose large inrunner motor, and then run detection.
3. During the detection, motor will turn, if you use outrunner motor, fix the motor to a bracket or something.
After detection finished, if detection no problem, will display a window shows you the result success.
4. Setup Input, this is to setup the throttle type you use, pair your throttle with your VESC and choose the throttle input and control type.
About control type, for water sports, recommend to use "Current No Reverse", this is without brake. For skateboard application, choose "Current No Reverse with Brake".
You can also do this step in App Setting.
5. After choose correct throttle input and control type, some values need to attention and adjust manually.
Motor Settings--General--Current
-Motor Current Max: can use current that was detected automatically in previous step
-Motor Current Max Brake and Battery Current Max Regen:
If you use without brake, this 2 values must set to "-1~-5A", if you use brake, then set this 2 values less than your battery or BMS acceptable max charging current.
-Absolute Maximum Current: This value should be larger than value Motor Current Max.
-Battery Current Max: Set this value according to your battery discharge current.
Then you can apply your throttle and check realtime data.
6. If you want to use BLDC mode, just choose in Motor Settings--General--General--Motor Type and choose BLDC, and then write in the value.
Please remember to write in "↓M" and "↓A" if any value has changed.